 深入理解一致性Hash原理
深入理解一致性Hash原理
一致性Hash常用于分布式缓存系统或负载均衡,将Key值/请求映射到具体机器IP上,并且增加和删除1台机器的数据移动量较小(不是没有)。
以分布式缓存系统为例,比如你有 N 个Redis 服务器,那么如何将一个对象Key映射到 N 个Redis上呢,你很可能会采用类似下面的通用方法计算Key 的hash值,然后均匀的映射到到N个cache。
求余算法: hash(Key)%N
那这种计算方法有什么问题呢?
- 一个 Redis 服务器挂掉了,这样所有映射到这台redis服务器的对象都会失效。如果需要把这台Redis服务器 从Redis集群中移除,这时候Redis服务器是 N-1 台,那么对应映射公式变成了 hash(Key)%(N-1) ;
- 还有一种情况是由于访问量增多,需要添加Redis服务器,这时候Redis是N+1台,映射公式变成了 hash(Key)%(N+1) ;
这意味着突然之间几乎所有的Redis缓存都失效了,所有的访问都会直接冲向数据服务器(引发缓存击穿),对数据服务器造成压力,甚至是数据服务器瘫痪。
如何解决上面的问题呢?一致性Hash算法就派上用场了。
# Hash环
一致性Hash算法也是使用取模的方法,只是,刚才描述的取模法是对服务器的数量进行取模,而一致性Hash算法是对2^32取模,什么意思呢?简单来说,一致性Hash算法将整个哈希值空间组织成一个虚拟的圆环,如假设某哈希函数H的值空间为0-2^32-1(即哈希值是一个32位无符号整形),整个哈希环如下:
整个空间按顺时针方向组织,圆环的正上方的点代表0,0点右侧的第一个点代表1,以此类推,2、3、4、5、6……直到2^32-1,也就是说0点左侧的第一个点代表2^32-1, 0和2^32-1在零点中方向重合,我们把这个由2^32个点组成的圆环称为Hash环。
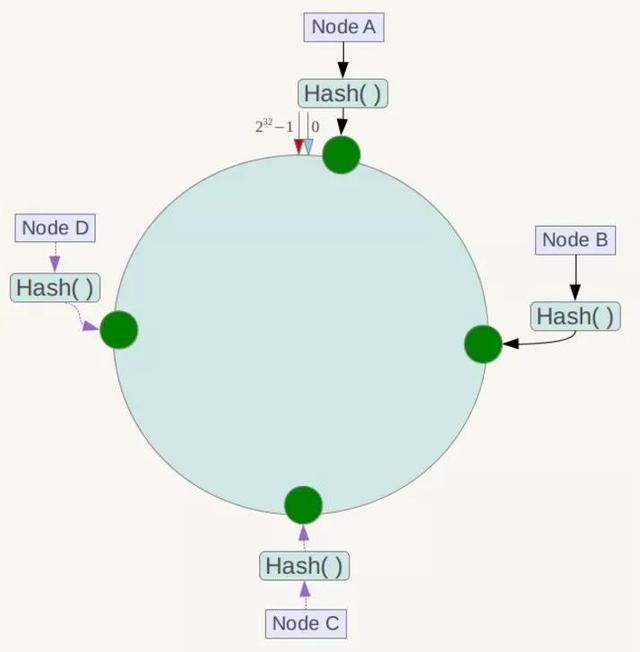
那么,一致性哈希算法与上图中的圆环有什么关系呢?假设我们有4台缓存服务器,Node A、Node B、Node C,Node D,这4台服务器有自己的IP地址或主机名,使用它们各自的IP地址或主机名作为关键字进行哈希计算,使用哈希后的结果对2^32取模,使用如下公式:
hash(服务器IP地址) % 2^32
通过上面公式算出的计算得到一个0到2^32-1之间的整数,在hash环上必定有一个点与这个整数对应,那么,这台服务器就可以映射到这个环上了,其他服务器一次类推即可得到相应的位置。
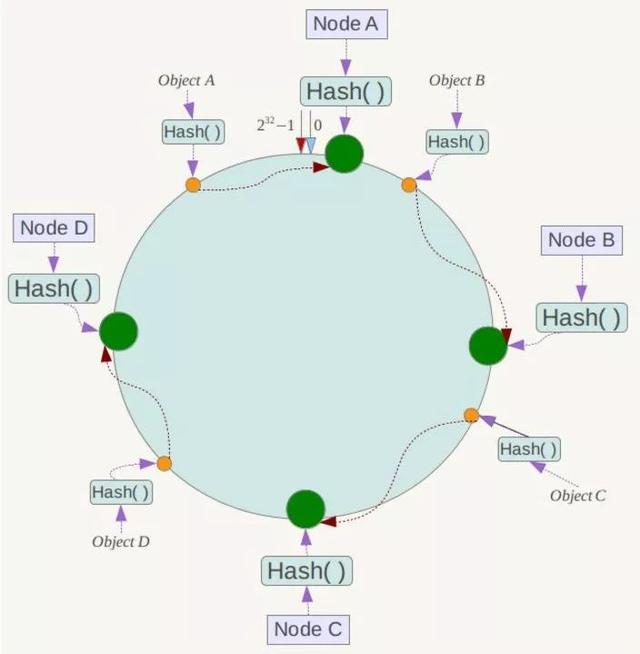
同时,将数据Object使用相同的函数Hash计算出哈希值,并确定此数据在环上的位置,从此位置沿环顺时针“行走”,遇到的第一台服务器就是该数据应该映射到的服务器,
# 容错性和可扩展性
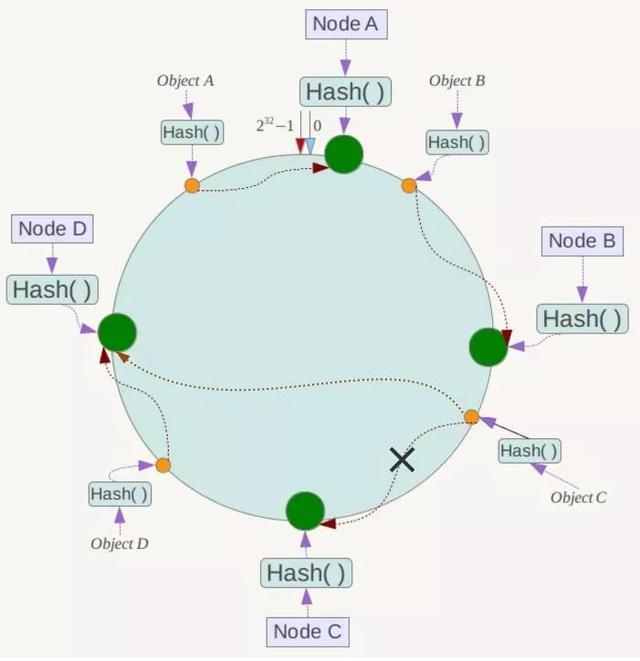
现假设Node C不幸宕机,可以看到此时对象A、B、D不会受到影响,只有C对象被重定位到Node D。一般的,在一致性Hash算法中,如果一台服务器不可用,则受影响的数据仅仅是此服务器到其环空间中前一台服务器(即沿着逆时针方向行走遇到的第一台服务器)之间数据,其它不会受到影响,如图所示:
下面考虑另外一种情况,如果在系统中增加一台服务器Node X,如下图所示:

此时对象Object A、B、D不受影响,只有对象C需要重定位到新的Node X !一般的,在一致性Hash算法中,如果增加一台服务器,则受影响的数据仅仅是新服务器到其环空间中前一台服务器(即沿着逆时针方向行走遇到的第一台服务器)之间数据,其它数据也不会受到影响。
综上所述,一致性Hash算法对于节点的增减都只需重定位环空间中的一小部分数据,具有较好的容错性和可扩展性。
# 虚拟节点
一致性Hash算法在服务节点太少时,容易因为节点分部不均匀而造成数据倾斜(被缓存的对象大部分集中缓存在某一台服务器上)问题,例如系统中只有两台服务器,其环分布如下hash:
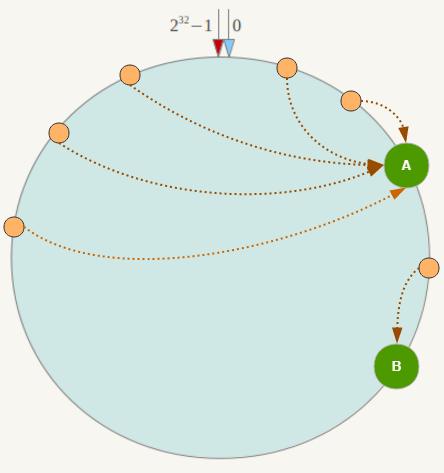
此时必然造成大量数据集中到Node A上,而只有极少量会定位到Node B上。为了解决这种数据倾斜问题,一致性Hash算法引入了虚拟节点机制,即对每一个服务节点计算多个哈希,每个计算结果位置都放置一个此服务节点,称为虚拟节点。具体做法可以在服务器IP或主机名的后面增加编号来实现。
例如上面的情况,可以为每台服务器计算三个虚拟节点,于是可以分别计算 “Node A#1”、“Node A#2”、“Node A#3”、“Node B#1”、“Node B#2”、“Node B#3”的哈希值,于是形成六个虚拟节点hash:

同时数据定位算法不变,只是多了一步虚拟节点到实际节点的映射,例如定位到“Node A#1”、“Node A#2”、“Node A#3”三个虚拟节点的数据均定位到Node A上。这样就解决了服务节点少时数据倾斜的问题。在实际应用中,通常将虚拟节点数设置为32甚至更大,因此即使很少的服务节点也能做到相对均匀的数据分布。